Voltage divider atau potential divider, adalah rangkaian sederhana untuk menurunkan besaran voltage. Dengan menggunakan 2 resistor yang dirangkai seri, kita dapat memecah voltage input. Rangkaian ini adalah termasuk rangkaian dasar yang sering digunakan dalam proyek elektronika.

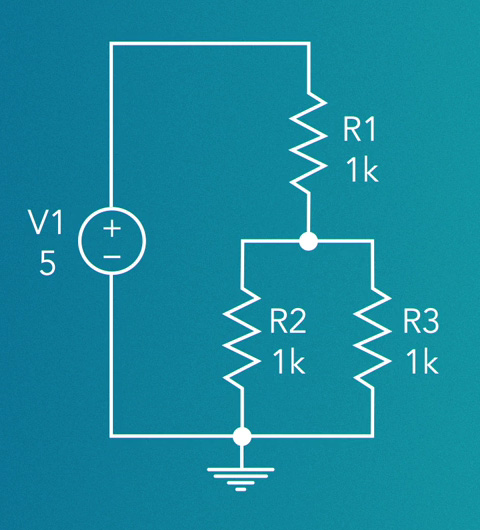
Voltage in (Vin) terhubung oleh kedua resistor. Saat kita mengukur voltage diantara 1 resistor (Vout), nilai voltage akan lebih kecil (terbagi). Formula untuk menghitungnya adalah seperti ini: Contoh soal adalah menghitung voltage pada R2.
Vout = R2 / (R2 + R1) * Vin
Jika pada contoh, kita menggunakan resistor bernilai 100Ω resistors (0.1kΩ) untuk R1 and R2, dan 5V voltage input.
Vout = 100 / (100 + 100) * 5 = 2.5 volts
Yang menarik adalah rangkaian voltage divider ini dipengaruhi rasio perbandingan R1 dan R2, berapapun nilai resistor, bila nilai kedua resistor sama, makan akan voltage output adalah setengahnya. Contoh:
R1 dan R2 menggunakan resistor 47Ω dan voltage input 5V.
Vout = 47 / (47 + 47) * 5 = 2.5 volts
Jadi kalau kalian ingin mendapat voltage yang lebih kecil, maka perlu mengutak-atik rasio antara R1 dan R2.
Voltage in (Vin) terhubung oleh kedua resistor. Saat kita mengukur voltage diantara 1 resistor (Vout), nilai voltage akan lebih kecil (terbagi). Formula untuk menghitungnya adalah seperti ini: Contoh soal adalah menghitung voltage pada R2.
Vout = R2 / (R2 + R1) * Vin
Jika pada contoh, kita menggunakan resistor bernilai 100Ω resistors (0.1kΩ) untuk R1 and R2, dan 5V voltage input.
Vout = 100 / (100 + 100) * 5 = 2.5 volts
Yang menarik adalah rangkaian voltage divider ini dipengaruhi rasio perbandingan R1 dan R2, berapapun nilai resistor, bila nilai kedua resistor sama, makan akan voltage output adalah setengahnya. Contoh:
R1 dan R2 menggunakan resistor 47Ω dan voltage input 5V.
Vout = 47 / (47 + 47) * 5 = 2.5 volts
Jadi kalau kalian ingin mendapat voltage yang lebih kecil, maka perlu mengutak-atik rasio antara R1 dan R2.